Wow I Didn't Know it's so EASY to Design Cycloidal Drives The White Owls 4:40 2 years ago 93 594 Далее Скачать
Unlocking 11 Nm Torque: The Ultimate Robot Actuator High Torque Robotics 1:15 1 year ago 12 968 Далее Скачать
Harmonic vs Cycloidal Drive - Torque, Backlash and Wear Test How To Mechatronics 21:23 1 year ago 1 938 303 Далее Скачать
DIY Cycloidal Laser-Cut All-Metal Robotic Actuator: Durable! HOX robotics 10:02 1 year ago 31 966 Далее Скачать
Inside a robot wrist, joint 5 & 6 (wrist & hand) hypoid gears working together RobotDoc 0:36 7 years ago 715 325 Далее Скачать
My new 3D printed ROBOT MiKE [How to build Robot] - First CODE Test GWAS Tech 4:20 2 days ago 219 Далее Скачать
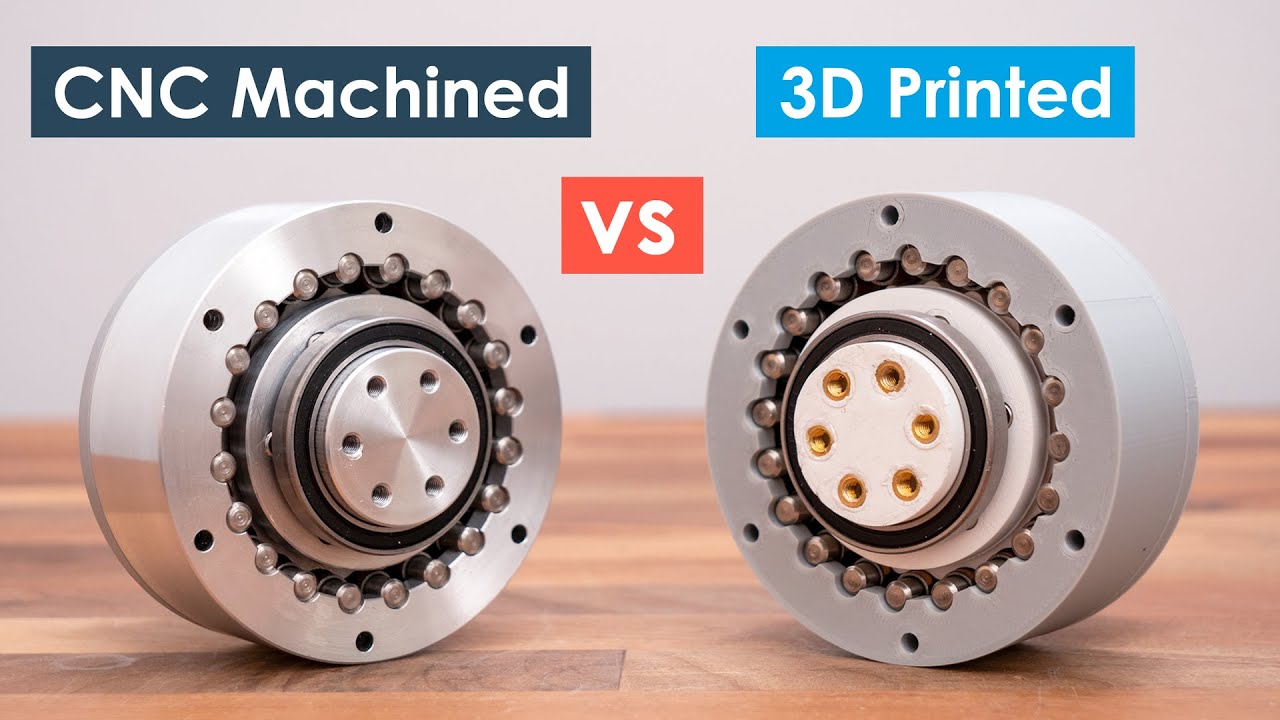
CNC Machined vs 3D Printed Cycloidal Drive How To Mechatronics 19:58 2 years ago 719 703 Далее Скачать
3D Printed Planetary Cycloidal Hub Gearbox. How far can it drive? Michael Rechtin 8:56 1 year ago 1 284 194 Далее Скачать
What is Cycloidal Drive? Designing, 3D Printing and Testing How To Mechatronics 16:36 2 years ago 1 101 198 Далее Скачать
What makes planetary gearboxes so amazing? 3D Printer Academy 9:59 2 years ago 4 942 453 Далее Скачать